If you prefer a watching instead of reading, we have a video version here
In this tutorial, we'll spend about 5 minutes to learn how to use step response graph to find the right P-D gain for your quad.
Feel free to skip this section if you don't want to get into too much detail for now.
First, what is P-D balance and why does it matter? To answer this question, let's first answer why we want to tune our quad. There are two main reasons
For Betaflight, P-D balance is mostly for #1. Here is how it works, when we move our sticks, the P component of the PID loop is the factor that pushes the quad into the move[1], whereas the D component is the factor that prevents the quad from moving. In fact, in Betaflight D is always a factor that prevents the quad from any kind of movement. We'll go into more details on this in later tutorials.
We need a good P to D ratio to achieve good response from our quad -- in the beginning of our stick move, we mostly need P to kick the quad into the move, and don't need D, but at the end of our stick move, we need D to stop the quad from further movement to avoid overshoot. If P/D ratio is too high, the quad will move more than what we command it to do (overshoot), if P/D ratio is too low, the quad will be sluggish to do what we command it to do.[2]
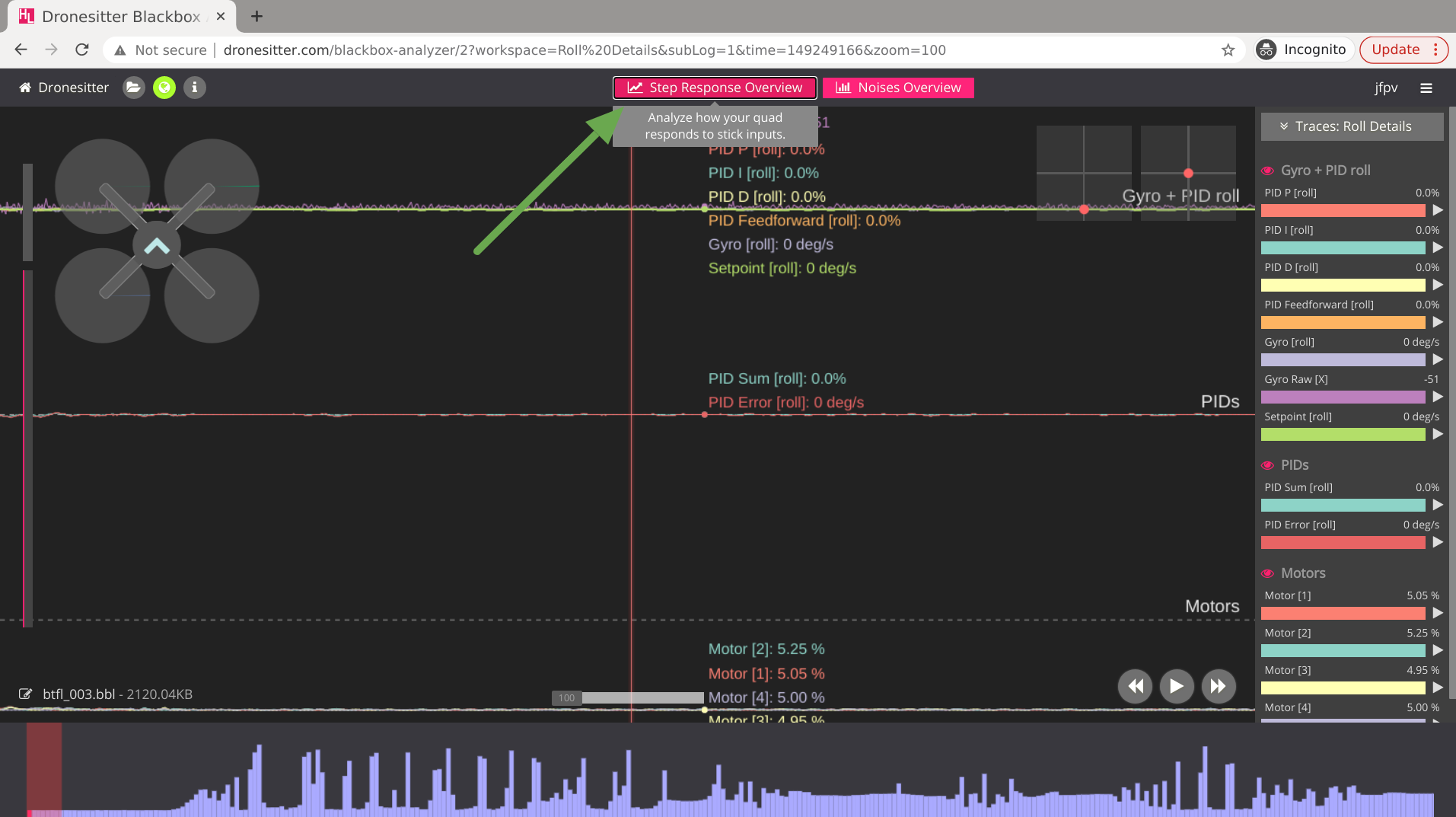
With that, let's take a look at how to use FPVSIM's "Step Response Overview" feature to find the best P/D ratio for your quad.
Click on the "Step Response Overview" button at the top. In 1 or 2 seconds, it should generate the step response graph for all ROLL, PITCH, YAW axes.
You should see three graphs that look like this
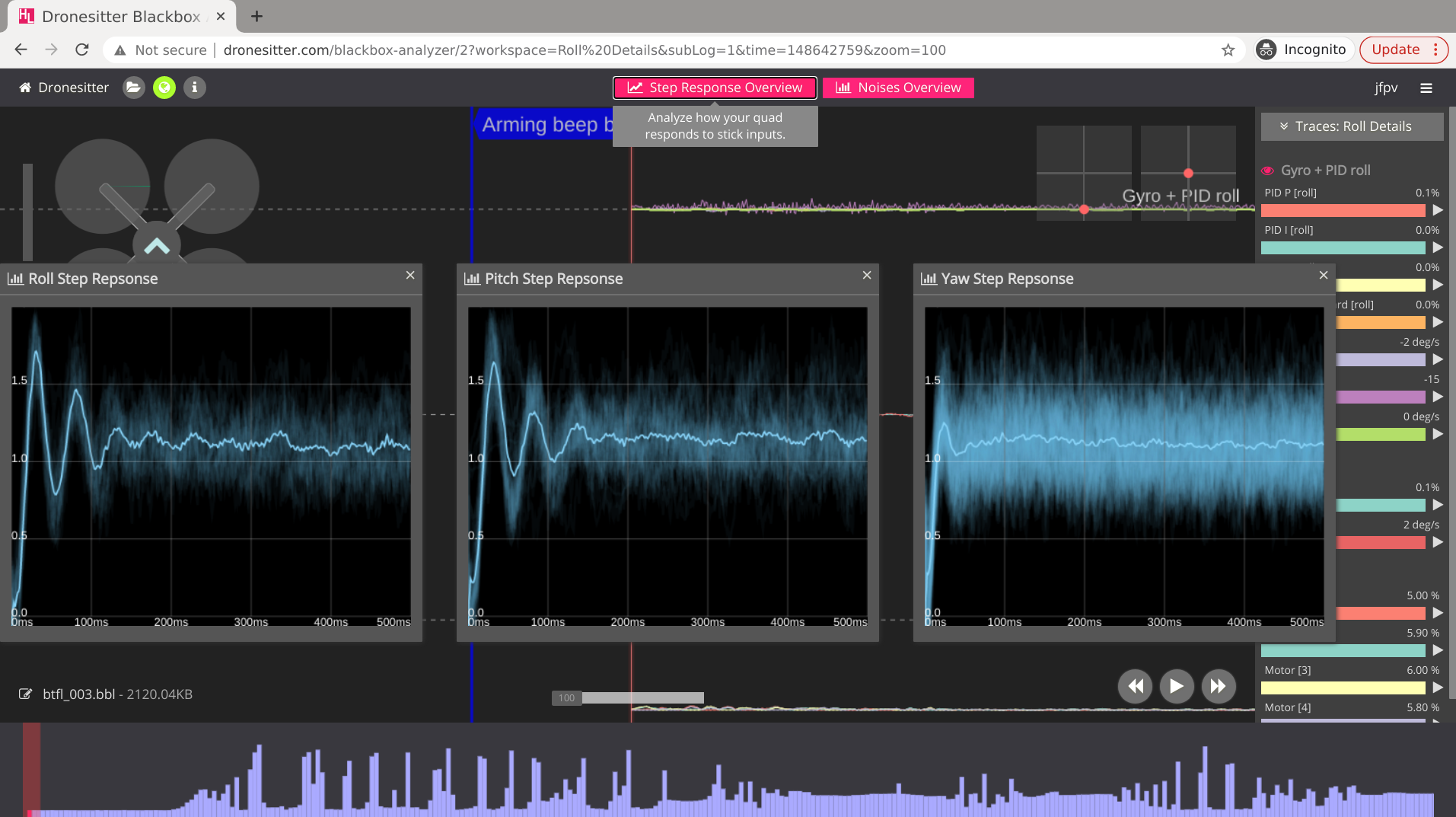
The graph above is a good example for P being too high thus it swings several times before converging. The following is what a good P/D balance looks like:
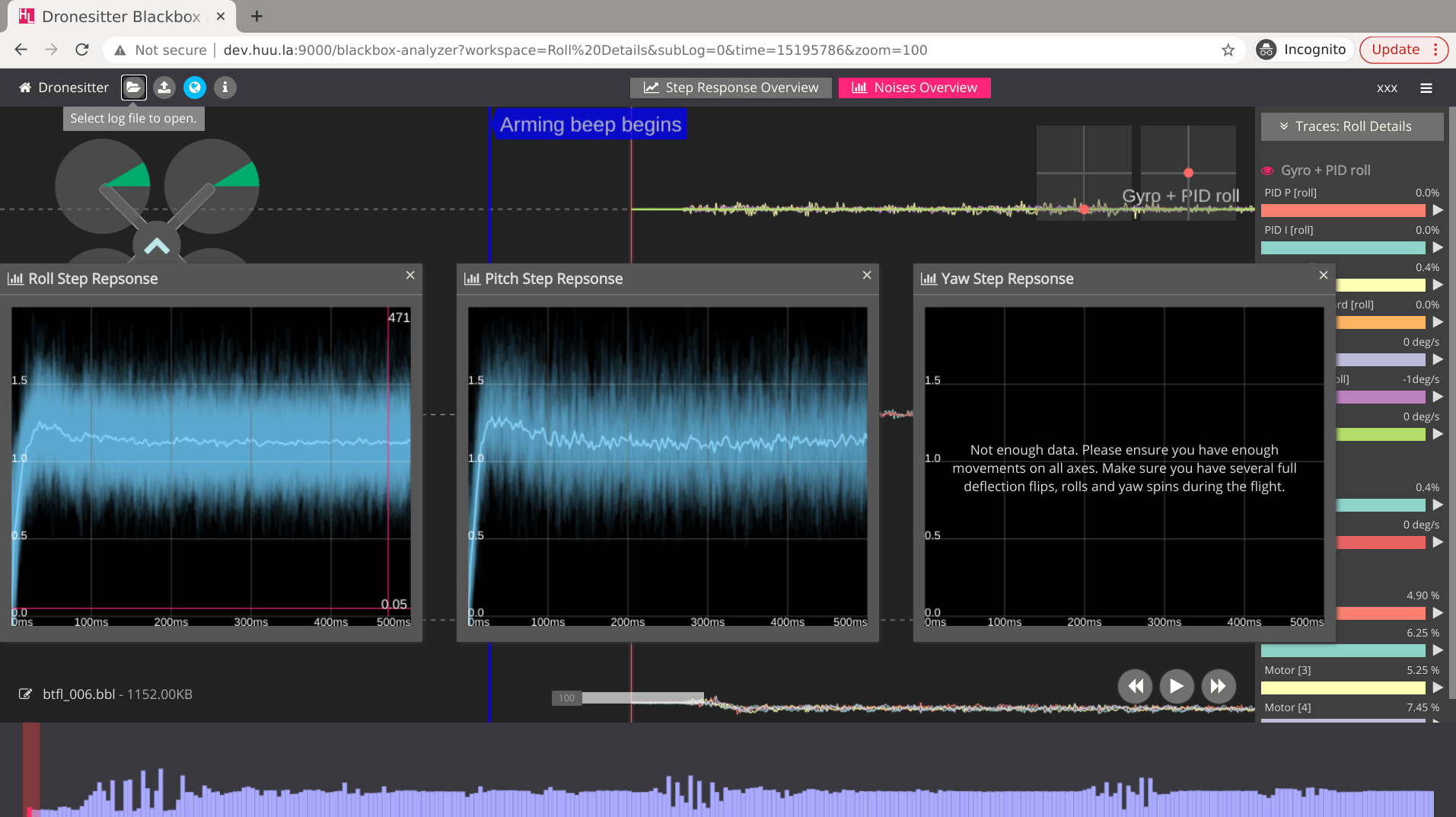
If it looks like P/D is too high, lower P (by 5 for example), otherwise increase P until your graph looks similar to the good P/D balance. Then go back to step 3.
Once you find the perfect P/D balance, you can increase P and D up with the ratio kept until you get oscillations. This is then the perfect value for P and D.[3] This step makes sure your quad can resist disturbances well. We'll get into more details on this in later tutorials.
This is basically how you tune the P and D gain of your quads. Which are two of the most important tuning parameters of a quad. This will help the quad better track your stick input and overcome any prop wash or turbulence.